




高光谱成像仪获取的光谱数据怎么提取特征波长?
发布时间:2024-03-15
浏览次数:1634
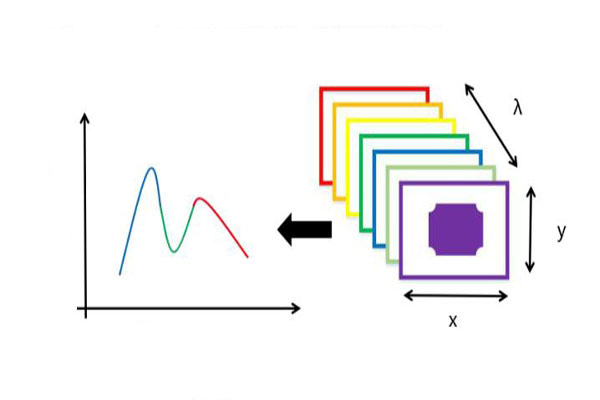
高光谱成像仪在数据采集的过程中,获取的光谱波段数据非常的庞大,包含的冗余和共线性信息会影响模型的预测精度。因此,需要对提取的光谱数据进行优化,提取特征波长。本文对高光谱成像仪光谱数据特征波长的提取方法做了介绍。
高光谱成像仪在数据采集的过程中,获取的光谱波段数据非常的庞大,包含的冗余和共线性信息会影响模型的预测精度。因此,需要对提取的光谱数据进行优化,提取特征波长。本文对高光谱成像仪光谱数据特征波长的提取方法做了介绍。

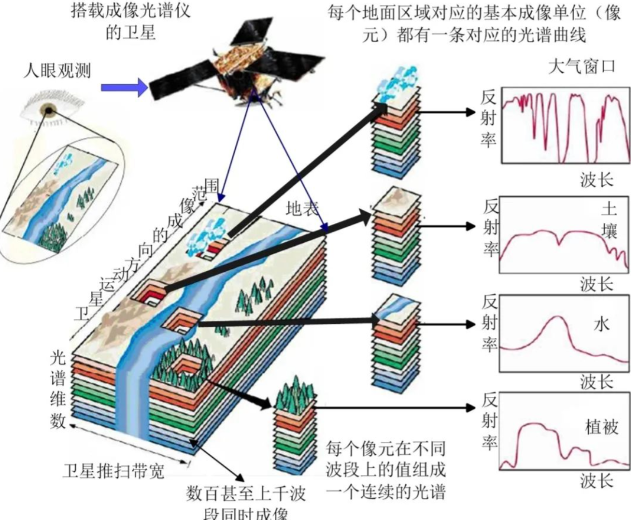
高光谱成像仪器和光谱仪一般能够获得数百个光谱波段,同时光谱分析需要收集大量样本,光谱矩阵往往非常庞大,光谱分析效率不高。同时光谱数据中包含的冗余和共线性信息会影响模型的预测精度。因此,需要对提取的光谱数据进行优化,去除冗余变量,寻找对模型建立起到关键作用的波长变量,减少波长个数,简化和优化模型。提取得到的特征波长还有助于分析光谱检测机理,开发简易、低成本的多光谱成像检测设备。
常用的特征波长选择方法有连续投影算法、无信息变量消除、遗传算法、逐步回归法、回归系数法、载荷系数法、竞争性自适应重加权算法、Random Frog等,其中竞争性自适应重加权算法和Random Frog是两种新型的波长选择方法,得到越来越广泛的应用,下文对这两种特征波长提取方法做了介绍。
1.竞争性自适应重加权算法
作为一种新的变量选择算法,竞争性自适应重加权算法(CARS)是由研究人员在2009年提出。该方法与偏最小二乘回归算法相结合,通过模仿达尔文进化论中“适者生存”的原则,每次采样过程中利用指数衰减函数(EDP)和自适应重加权采样技术(ARS)去除偏最小二乘回归模型中回归系数绝对值权重较小的变量,优选出回归系数绝对值权重较大的变量,N次采样后得到N个变量子集,依据交互验证选出交互验证均方根误差(RMSECV)最小的变量子集,该子集所包含的变量即为最优特征波长变量组合。
2.Random Frog算法
Random Frog是一种新的变量提取方法,是一种类似于可逆跳转马尔可夫链蒙特卡洛(RJMCMC)的算法,通过在模型空间中模拟一条服从稳态分布的马尔可夫链,来计算每个变量的被选概率,从而进行变量的选择。Random Frog与偏最小二乘回归算法相结合,建模方法采用偏最小二乘回归,模型中每个变量回归系数的绝对值大小作为每次迭代过程中该变量是否被剔除的依据。
上一页 : 高光谱成像仪获取的光谱数据的预处理方法有哪些?
下一页 : 高光谱图像数据怎么降噪与提取?

相关产品
-
高光谱数据降维和高光谱数据预测模型构建方法有哪些?
高光谱信息在采集的过程中存在光散射、检测物图像不规则以及随机噪声等不利因素,会使光谱曲线出现不平滑,信噪比较低等问题,所以在进行相关数据分析之前需要进行相应的处..
-
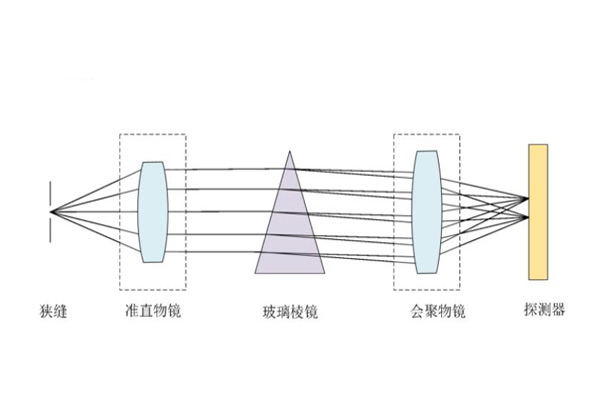
高光谱成像仪最常见的三种分光方式是哪三个?
对于高光谱成像仪而言,其分光系统是高光谱成像仪中的关键部分,直接影响着系统的分光性能、结构的复杂程度、重量和体积等。那么, 高光谱成像仪最常见的三种分光方式是哪..
-

影响无人机高光谱植被覆盖度估算精度的主要因素
近年来,无人机高光谱遥感技术凭借其高空间分辨率、高光谱分辨率、灵活机动等优势,逐渐成为植被覆盖度估算的重要手段。..
-
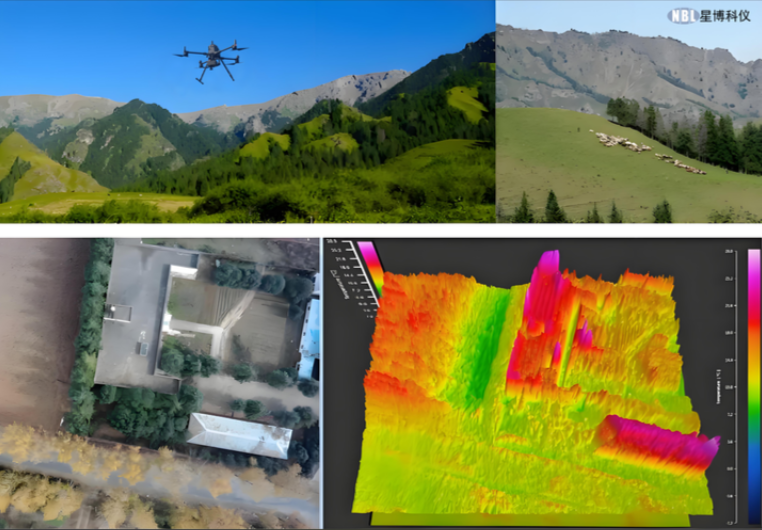
无人机高光谱在农作物病害监测中的应用优势
无人机高光谱遥感技术作为新兴的无损检测手段,通过搭载高光谱成像设备,能够快速获取农作物冠层的精细光谱信息,为病害的早期识别、定量分析与精准防控提供数据支撑。本文..










