




高光谱对岩石渗水光谱的研究
发布时间:2023-03-29
浏览次数:2027
基于近红外成像高光谱技术的岩石光谱随水渗入时间的变化研究
基于近红外成像高光谱技术的岩石光谱随水渗入时间的变化研究
一、测试原理及方法:
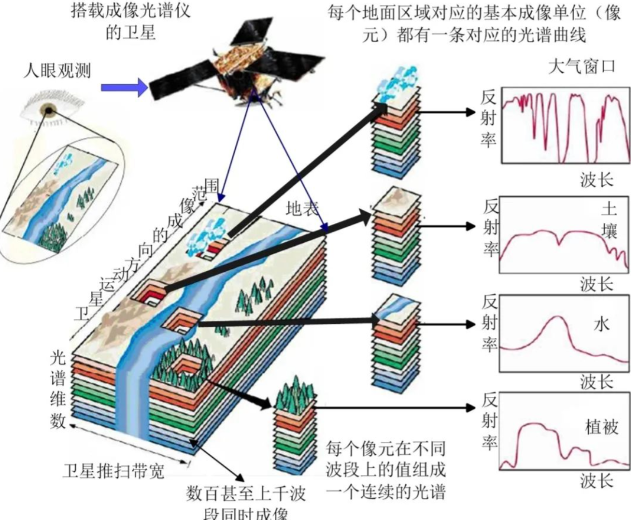
高光谱成像技术是近二十年来发展起来的基于非常多窄波段的影像数据技术,其最突出的应用是遥感探测领域,并在越来越多的民用领域有着更大的应用前景。它集中了光学、光电子学、电子学、信息处理、计算机科学等领域的先进技术,是传统的二维成像技术和光谱技术有机的结合在一起的一门新兴技术。
高光谱成像技术的定义是在多光谱成像的基础上,在从紫外到近红外(200-2500nm)的光谱范围内,利用成像光谱仪,在光谱覆盖范围内的数十或数百条光谱波段对目标物体连续成像。在获得物体空间特征成像的同时,也获得了被测物体的光谱信息。
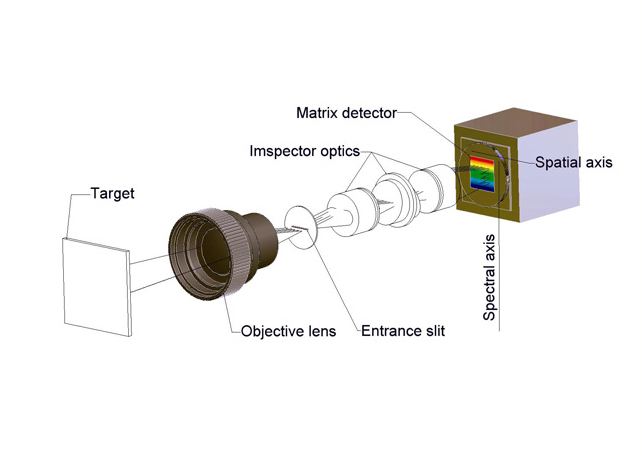
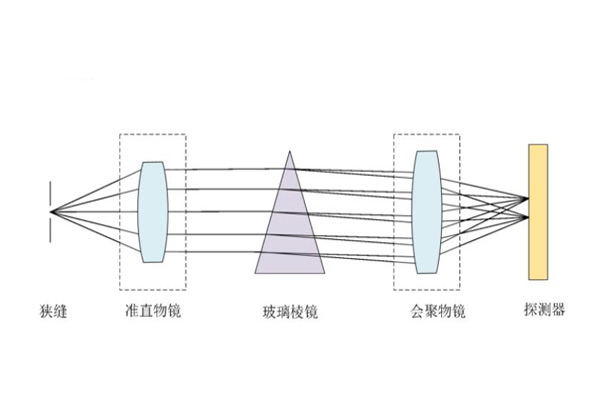
目标物体-成像物镜-入射狭缝-准直透镜-PGP-聚焦透镜-CCD棱镜-光栅-棱镜:PGP
图1 成像原理图
光谱仪的光谱分辨率由狭缝的宽度和光学光谱仪产生的线性色散确定。最小光谱分辨率是由光学系统的成像性能确定的(点扩展大小)。
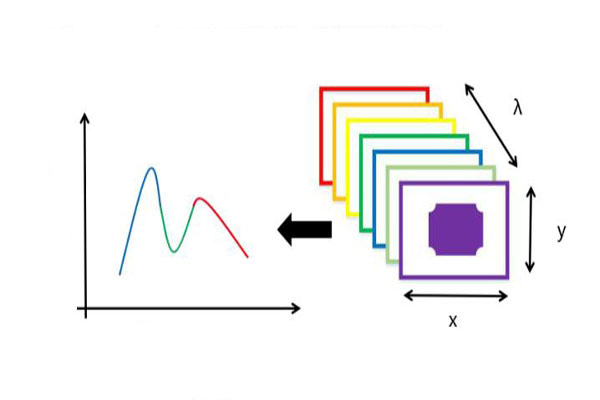
成像过程为:每次成一条线上的像后(X方向),在检测系统输送带前进的过程中,排列的探测器扫出一条带状轨迹从而完成纵向扫描(Y方向)。综合横纵扫描信息就可以得到样品的三维高光谱图像数据。
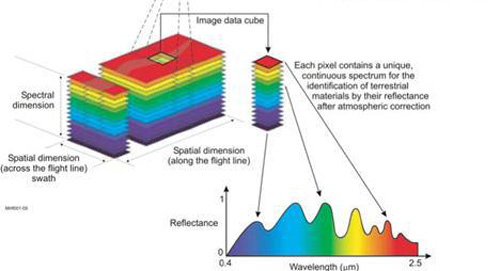
图2 像立方体
二、材料与分析:
1、实验设备与材料
本文以砂岩、砾岩为研究对象,利用近红外高光谱成像仪采集测试对象的高光谱影像数据,从而分析水渗入岩石时,砂岩、砾岩的光谱反射率随水渗入时间的变化规律。表1为近红外高光谱成像仪系统参数。
表1 近红外高光谱成像仪系统参数
序号 | 相关参数 | 数值 |
1 | 光谱范围 | 900-1700 nm |
2 | 光谱分辨率 | 4-5 nm |
3 | 像面尺寸 | 7.6×14.2 |
4 | 倒线色散 | 110 nm/mm |
5 | 相对孔径 | F/2.0 |
6 | 杂散光 | <0.5% |
7 | 波段数 | 256 |
2、高光谱影像数据预处理
对成像光谱仪获取的原始影像数据进行数据的预处理,预处理过程主要包括两部分。第一部分是辐射定标;第二部分为噪声去除。
首先进行辐射定标。辐射定标的计算公式如1所示。

其中,Reftarget为目标物的反射率,Refpanel为标准参考板的反射率,DNtarget为原始影像中目标物的的数值,DNpanel为原始影像中标准参考板的数值,DNdark为成像光谱仪系统误差。
其次是噪声去除,常用的方法有小波降噪、S-G降噪、均值滤波、最小噪声分离等方法。本研究则运用国外较为常用的最小噪声分离方法(Minimum Noise Fraction Rotation, MNF)进行噪声去除。最小噪声分离工具用于判定图像数据内在的维数(即波段数),分离数据中的噪声,减少随后处理中的计算需求量。MNF本质上是两次层叠的主成分变换。第一次变换(基于估计的噪声协方差矩阵)用于分离和重新调节数据中的噪声,这步操作使变换后的噪声数据只有最小的方差且没有波段间的相关。第二步是对噪声白化数据(Noise-whitened)的标准主成分变换。为了进一步进行波谱处理,通过检查最终特征值和相关图像来判定数据的内在维数。数据空间可被分为两部分:一部分与较大特征值和相对应的特征图像相关,其余部分与近似相同的特征值以及噪声占主导地位的图像相关。由于此次采集的高光谱影像没有白板校正,因此数据预处理的第一步辐射定标没有进行分析处理,直接作MNF降噪分析。图3为MNF降噪前后的成像高光谱数据中DN值的变化。
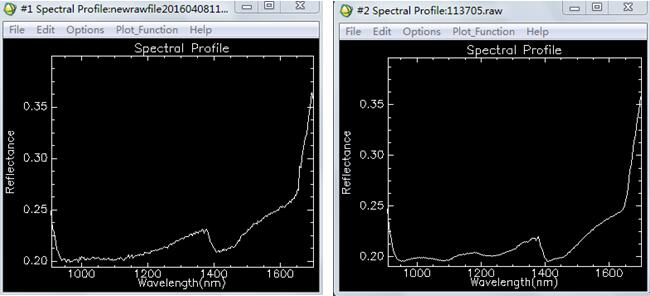
图3 MNF变换前(左)后(右)高光谱影像DN值的变化
3、特征波段的获取
特征波段的选择对于建立稳定的光谱模型是至关重要的。采用全波段的光谱数据建立模型时,不仅计算工作量大,而且校正模型的预测精度也很难达到最优值。因此在建立校正模型前进行特征波段选择是很有必要的。目前,常用的特征波段选择方法有相关系数法、方差分析、逐步多元线性回归、粒子群算法、反向区间偏最小二乘法和连续投影算法等。其中连续投影算法是一种新型的波长选择方法,得到了越来越广泛的应用(成忠等, 2010; Moreira et al., 2009; Gomes et al., 2013; Talfan et al., 2015; Liu et al., 2009),本研究也采用该算法进行特征波段的提取。连续投影算法(Successive Projections Algorithm, SPA) (Araujo et al, 2001) 是一种能够从光谱信息中充分寻找含有最低限度的冗余信息的变量组,使得各变量之间的共线性达到最小。它是一种确定性的搜索方法,其变量选择的结果是可重现的,这对于验证集的变量选择会更稳健,它能够从严重重叠的光谱信息中提取有效信息,极小化光谱变量之间的共线性影响,简化校正模型和提高建模的速度和效率。
四、结果与分析
1、 砂岩光谱反射率随着水渗入时间的变化
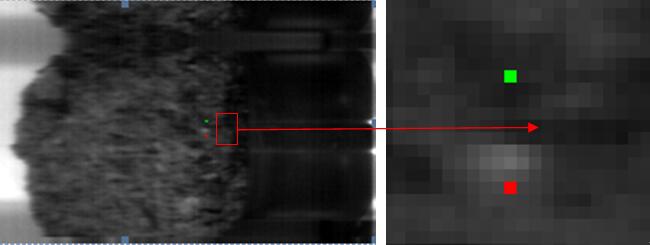
为了能较为客观的了解砂岩光谱反射率随水渗入时间的变化规律,本研究在高光谱影像上任意获取砂岩的两个像元点,观察其随水渗入时间光谱变化规律,像元点选取位置及其光谱反射率随水渗入时间的变化如图4所示。从图4可知,从900-1700 nm范围内,随水渗入时间的推移,砂岩的光谱反射率总体趋势为下降,在1420 nm附近较为显著的水汽吸收谷,随后反射率逐渐上升,在1650 nm后反射率呈指数上升趋势。
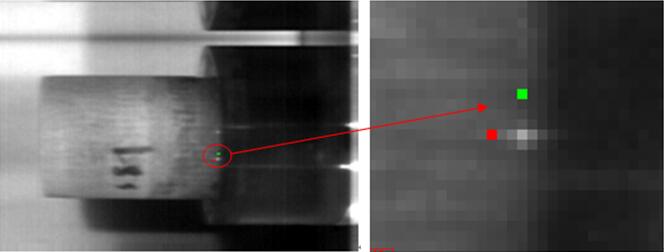
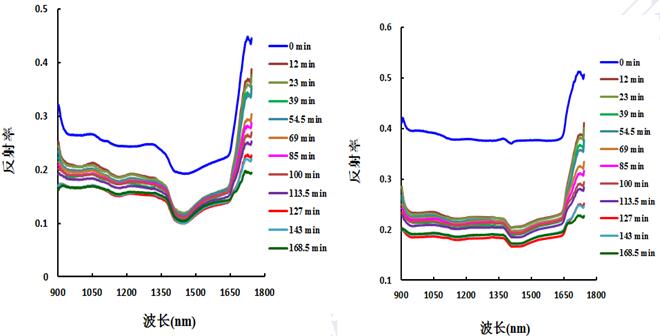
图4砂岩光谱反射率随着水渗入时间的变化(左为红色,右为绿色)
2、砾岩光谱反射率随着水渗入时间的变化
与砂岩分析相似,为了能较为客观的了解砾岩光谱反射率随水渗入时间的变化规律,本研究在砾岩的高光谱影像上任意获取两个像元点,观察其随水渗入时间光谱变化规律,像元点选取位置及其光谱反射率随水渗入时间的变化如图5所示。从图5可知,从总体上,两个像元的光谱反射率随水渗入时间,砾岩的光谱反射率变化趋势相一致,不同的是反射率高低不一致(这是因为砾岩每个像元点之间也是存在差异的)。从900-1700 nm范围内,随水渗入时间的推移,砾岩的光谱反射率总体趋势为下降,在1430 nm附近较为显著的水汽吸收谷,随后反射率回升。
![]()
图5砾岩光谱反射率随着水渗入时间的变化(左为红色,右为绿色)
3、砂岩光谱反射率与水渗入岩石时间的相关性分析
图4分别列举了砂岩高光谱影像中两像元点随水渗入时间的光谱反射率变化规律,从图4可知,随着水渗入时间的推移,砂岩的光谱反射率呈一定的变化规律。图6则分别分析砂岩高光谱影像中两个像元光谱反射率与水渗入时间的相关性,其中左边为红色像元点,右边为绿色像元点的相关性分析图。从图6可知,砂岩高光谱上的不同像元点,其波段相关性与水渗入有着显著差异,但是相关性的变化趋势及最相关波段的范围与相关系数等相似。
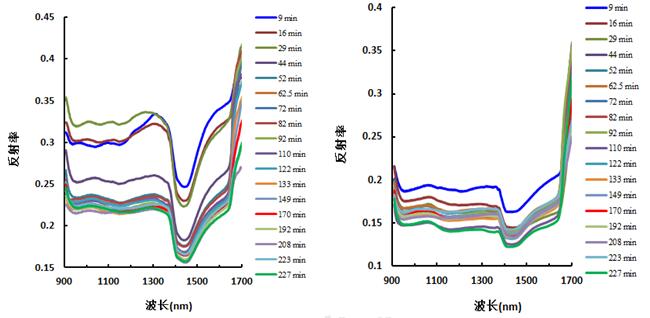
图6砂岩光谱反射率与水渗入岩石时间的相关性分析(左为红色像元,右为绿色像元)
4、砾岩光谱反射率与水渗入岩石时间的相关性分析
图5分别列举了砾岩高光谱影像中两像元点随水渗入时间的光谱反射率变化规律,从图5可知,随着水渗入时间的推移,虽然砾岩的像元点光谱反射率高低不太相似,但是呈现变化规律一致。图7则分别分析砾岩高光谱影像中两个像元光谱反射率与水渗入时间的相关性,其中左边为红色像元点,右边为绿色像元点的相关性分析图。从图7可知,砾岩高光谱上的不同像元点,其波段相关性与水渗入有着显著差异,但是相关性的变化趋势及最相关波段的范围与相关系数等相似。
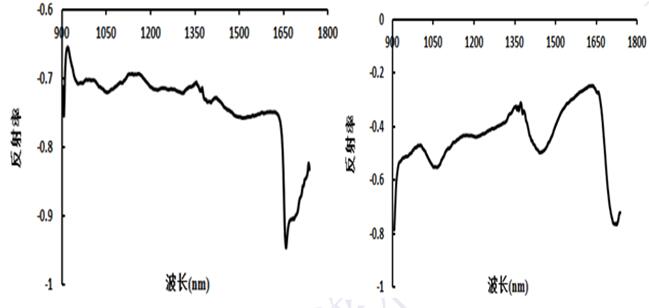
图7砾岩光谱反射率与水渗入岩石时间的相关性分析(左为红色像元,右为绿色像元)
5、砂岩随水渗入岩石时间的光谱特征波长选择及模型构建
本研究利用Matlab编写的SPA来提取砂岩基于水渗入时间变化的特征波长,以减少变量的输入个数简化后期建模过程。SPA运算过程所设定的特征个数为3-10,特征波个数根据RMSE确定,如图8的Figure1所示,RMSE越小,水渗入时间的估算越精确,Figure2为确定特征波段的波段位置。表2分别列出了基于连续投影算法的砂岩随水侵时间的特征波长的波段位置,越靠前,其特征波段重要性越高,特征波段分别为1552.65、1658.47、1698.22、903.28 nm。
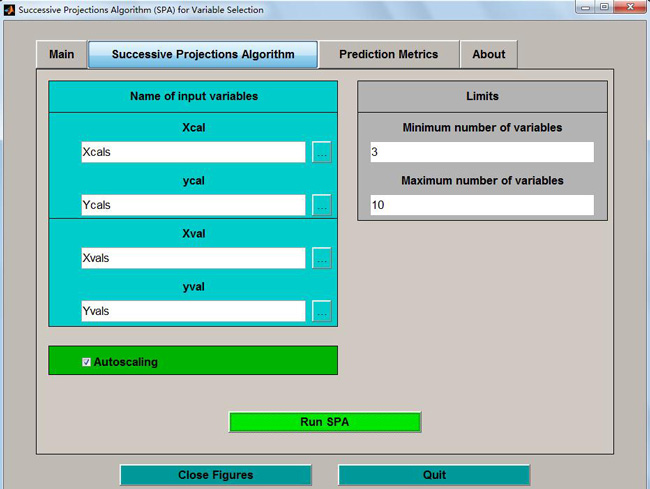
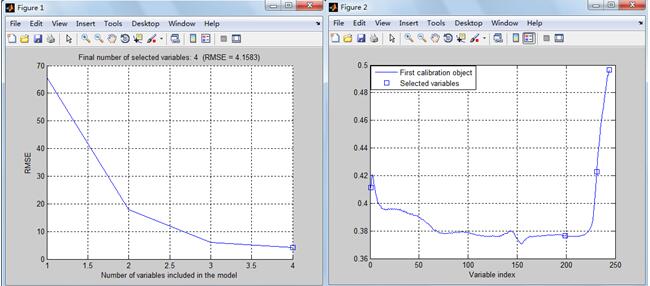
图8砂岩随水渗入岩石时间的光谱特征波长选择参数设置及特征波长确定
表2 基于连续投影算法的砂岩随水侵时间的特征波长
对象 | 特征波长(根据特征波长的主次排列,越靠前波段越重要)(nm) |
砂岩 | 1552.65、1658.47、1698.22、903.28 |
根据选取的砂岩特征波段运用逐步多元回归分析SMR构建模型并运用独立的数据对模型进行检验,实测值与预测值之间的PRESS为207.49,RMSEP为4.16 min,SDV为4.13,BIAS为-1.30,相关系数r为0.997.
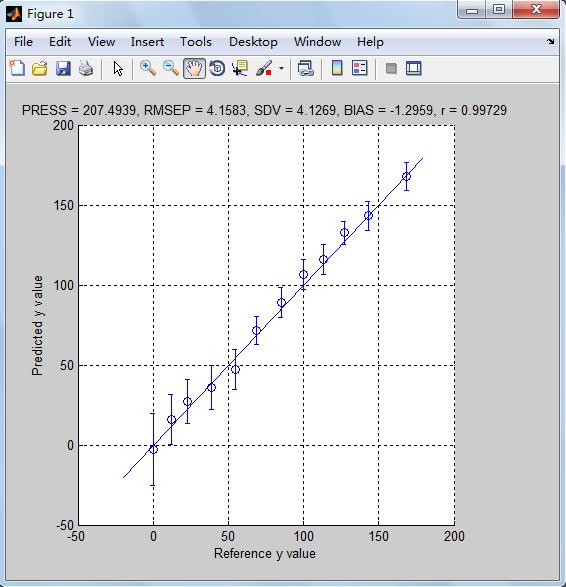
图9 基于特征波段构建模型及检验效果图
6、砾岩随水渗入岩石时间的光谱特征波长选择及模型构建
与砂岩研究相似,SPA运算过程所设定的特征个数为3-10,特征波个数根据RMSE确定,如图10的Figure1所示,RMSE越小,水渗入时间的估算越精确,Figure2为确定特征波段的波段位置。表3分别列出了基于连续投影算法的砾岩随水侵时间的特征波长的波段位置,越靠前,其特征波段重要性越高,特征波段分别为1381.20、1430.59、909.80、1698.22、903.28 nm。
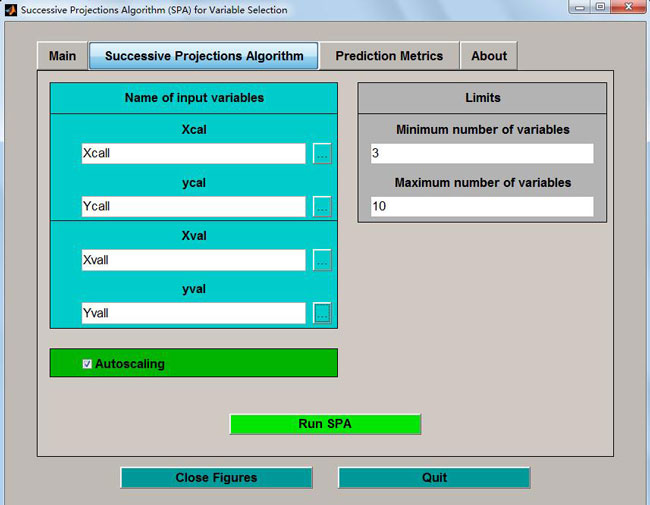
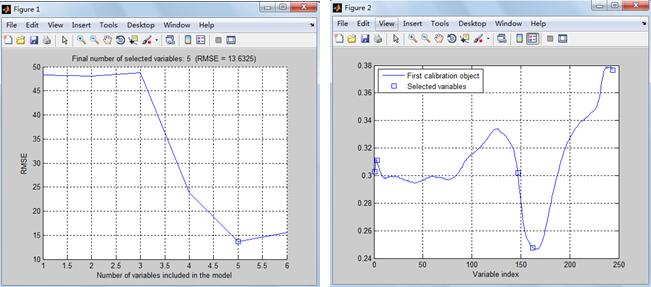
图10砾岩随水渗入岩石时间的光谱特征波长选择参数设置及特征波长确定
表3 基于连续投影算法的砾岩随水侵时间的特征波长
对象 | 特征波长(根据特征波长的主次排列,越靠前波段越重要)(nm) |
砾岩 | 1381.20、1430.59、909.80、1698.22、903.28 |
根据选取的砾岩特征波段运用逐步多元回归分析SMR构建模型并运用独立的数据对模型进行检验,实测值与预测值之间的PRESS为1672.61,RMSEP为13.63 min,SDV为13.67,BIAS为-4.46,相关系数r为0.984。
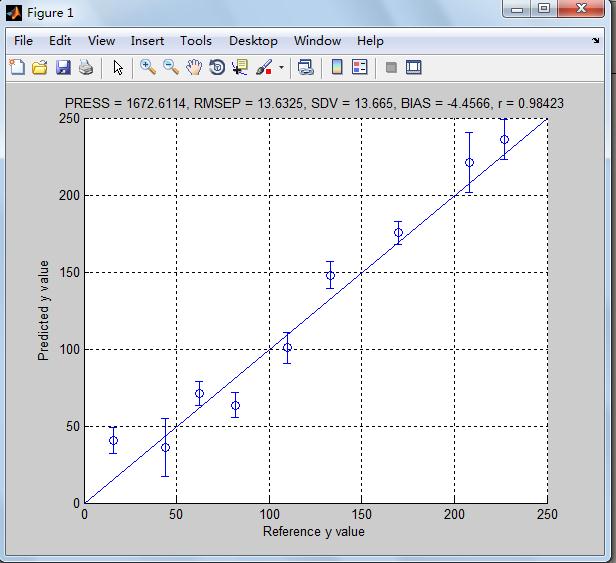
图11 基于特征波段构建模型及检验效果图
五、讨论
本研究运用单个像元点来分析砂岩、砾岩受水渗入后,其光谱反射率的变化趋势,并运用连续投影算法提取了特征波长,同时利用逐步多元回归分析构建光谱与水渗入时间的模型,结果表明,无论是砂岩或者砾岩,所构建的模型精度都较高,其中砂岩的RMSP为RMSEP为4.16 min,相关系数r为0.997;砾岩的RMSEP为13.63 min,相关系数r为0.984。
研究者可根据自己的研究方向,针对局部(整体)砂岩或者砾岩,研究其随水渗入时间光谱反射率的变化规律。除了逐步多元回归分析算法,研究者还可以运用光谱指数、主成分分析、偏最小二乘法、人工神经网络、支持向量机、方法有相关系数法、方差分析、逐步多元线性回归、粒子群算法、反向区间偏最小二乘法和连续投影算法等,研究者均可尝试分析。常用的数据处理软件有ENVI、ERDAS、MATLAB、excel等,研究者往往不可能只通过一个软件就把数据分析的完全彻底,需要综合几个软件进行分析,而且要求研究者有较好的编程能力。
上一页 : 无人机高光谱对水质污染分析
下一页 : 高光谱相机分析砾岩岩石报告

相关产品
-
高光谱数据降维和高光谱数据预测模型构建方法有哪些?
高光谱信息在采集的过程中存在光散射、检测物图像不规则以及随机噪声等不利因素,会使光谱曲线出现不平滑,信噪比较低等问题,所以在进行相关数据分析之前需要进行相应的处..
-
高光谱成像仪最常见的三种分光方式是哪三个?
对于高光谱成像仪而言,其分光系统是高光谱成像仪中的关键部分,直接影响着系统的分光性能、结构的复杂程度、重量和体积等。那么, 高光谱成像仪最常见的三种分光方式是哪..
-

影响无人机高光谱植被覆盖度估算精度的主要因素
近年来,无人机高光谱遥感技术凭借其高空间分辨率、高光谱分辨率、灵活机动等优势,逐渐成为植被覆盖度估算的重要手段。..
-
无人机高光谱在农作物病害监测中的应用优势
无人机高光谱遥感技术作为新兴的无损检测手段,通过搭载高光谱成像设备,能够快速获取农作物冠层的精细光谱信息,为病害的早期识别、定量分析与精准防控提供数据支撑。本文..










