




无人机高光谱对水质污染分析
发布时间:2023-03-29
浏览次数:2038
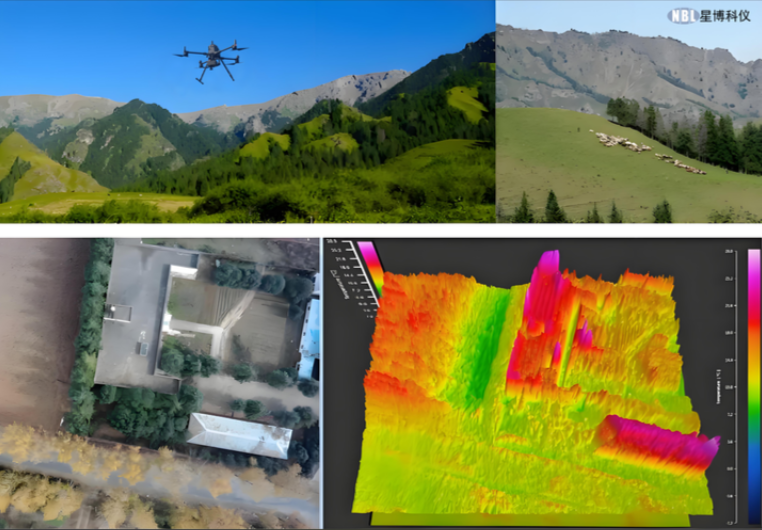
本次试验采用大疆六旋翼无人机,在无人机遥感平台上搭载高光谱相机,该无人机遥感平台采用的是无人机悬置空中,高光谱相机采用内置推扫的方式获取地面图像。
1 引言
水是生命之源,同时作为生态系统的血液,是人类生存、生产、生活的基础,充足优质的水资源是生态系统得以健康循环的首要条件,然而水资源却极易受到污染,特别是一些内陆水体,由于自然封闭性其污染问题就更加突出,同时水资源作为污染物的载体,具有动态的扩散和蔓延特性,会进一步加剧水体的污染程度。我国河流、湖泊众多,伴随经济的高速发展,人类活动的增强,河流、湖泊水质污染问题日益严重,已经成为制约城市可持续发展的关键因素,因此有必要利用高新技术手段展开河流、湖泊水质污染问题研究,及时、快速的提供河流、湖泊的水质状况,保障人们正常的生产生活。
传统的河流、湖泊水质监测主要是采用实地采样和实验室分析等方法,这种监测方法需要在河流、湖泊内定点、定剖面进行,通过常年累月的监测、记录和实验室分析,虽然能够达到一定的数据精度,但是不能反映河流、湖泊水质的总体时空状况,且费时费力、监测区域有限,只具有局部和典型的代表意义,不能满足实时、快速、大尺度的监测和评价要求。
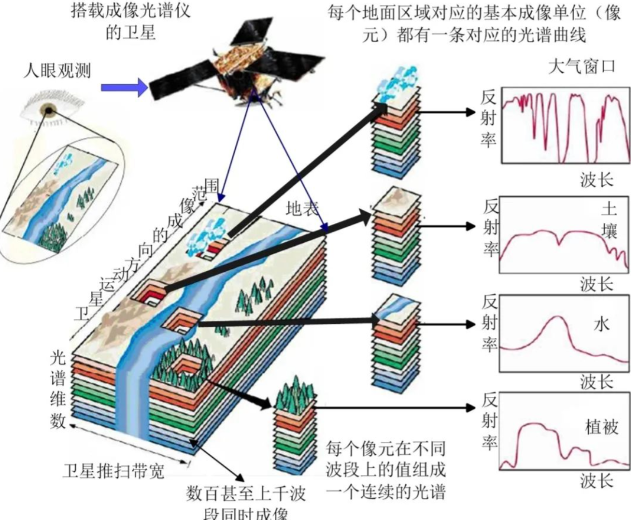
遥感技术的发展与进步为河流、湖泊水体的监测和研究开辟了新的途径。遥感水质监测技术具有高动态、低成本和宏观性等显著特点,在河流、湖泊水质污染研究方面有着常规检测不可替代的优点。它既可以满足大范围水质监测的需要,也可以反映水质在空间和时间上的分布和变化情况,弥补了单一采用水面采样的不足,同时还能发现一些常规方法难以揭示的污染源的分布以及污染物的迁移特征和影响范围,为科学布设水面采样点提供依据。高光谱遥感由于其高精度、多波段、信息量大等特点被广泛应用于遥感水质监测,大大提高了水质参数的估测精度。伴随着遥感技术的不断进步,水质监测已由定性描述转向定量分析,同时可监测的水质参数逐渐增加,反演精度也不断提高,在水资源的保护、规划和可持续发展方面发挥了重大作用。
2 材料与试验部分
2.1 研究区域
野外试验飞行在中山市和深圳市的某河流上进行。
2.2 数据采集设备
本次试验采用大疆六旋翼无人机,在无人机遥感平台上搭载高光谱相机,该无人机遥感平台采用的是无人机悬置空中,高光谱相机采用内置推扫的方式获取地面图像(其主要参数见表1)。在中山和深圳两市,无人机的飞行高度分别为123m和100m,分别采集了33景和87景图像,每景图像分别代表地面幅宽为49m*49m(中山市)和40m*40m(深圳市);无人机遥感平台的实景图,如图1。
表1 机载成像高光谱仪系统参数
序号 | 项目 | 参数 |
1 | 光谱扫描范围/nm | 400~1000 |
2 | 光谱分辨率/nm | 3.5 nm |
3 | 成像镜头/mm | 18.5 |
4 | 光谱通道数 | 360 |
5 | 全幅像素 | 1936×1456 |
6 | 传感器 | CCD Sony ICX 674 |

图1 无人机高光谱成像系统实景图
2.3 无人机高光谱数据的预处理与分析
无人机高光谱图像的预处理在软件中进行,包括镜像变换、黑白帧校准(如公式1所示)。

式中,Rref 是黑白校正过的图像的反射率值,DNraw 是原始图像的DN值,DNwhite为白板的白帧数据,DNdark 是相机的系统误差DN值。
考虑到无人机飞到一定高度后,高光谱成像仪获取的高光谱影像数据可能会受到大气、水汽等因素的影响。为了消除这些因素的影响,我们在无人机起飞之前,在拍摄区域放置一块经过国家计量院标定过的2m*2m灰布,在高光谱影像获取的时候,只需要在其中的一景高光谱影像中覆盖到灰布即可。消除大气、水汽等因素影响的方法如公式2所示。

式中,Rfixed 是消除大气、水汽等因素后的图像光谱反射率,Rref是经过黑白校正后的图像反射率,Rstandard是经过国家计量院标定的灰布的光谱反射率,Rgrayref 是经过黑白校正后图像中灰布的光谱反射率。
2.4 无人机高光谱影像拼接
无人机高光谱影像的拼接采用高光谱拼接软件进行拼接,该拼接软件有图像筛选、拼接预览、投影方式选择、拼接方法选择、重采样方法选择、是否匀色、拼接结果格式输出选择等功能。拼接软件界面如图2所示。
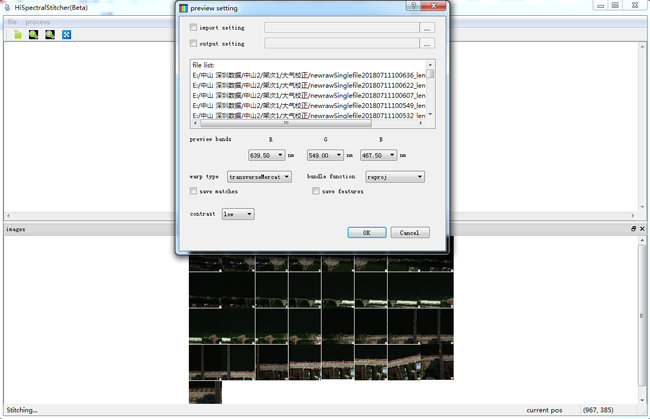
图2 无人机高光谱拼接软件HiSpectralStitcher
3 结果与分析
3.1 拼接结果预览
图3为利用无人机高光谱拼接软件HiSpectralStitcher对中山市和深圳市某河流及其河岸的无人机高光谱影像的三波段拼接效果预览图(RGB分别代表640 nm/550 nm/460 nm最邻近波长)。从拼接结果来看,中山市的河流影像数据拼接效果较好,深圳市的河流影像由于拍摄的时候处于中午12时,光照较为强烈,因此存在较大的镜面反射。
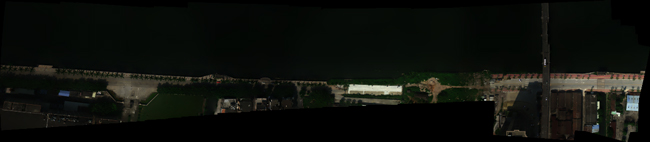
图3.1 中山市某河流无人机高光谱拼接预览图

图3.2 深圳市某河流无人机高光谱拼接预览图
3.2 无人机高光谱影像河流提取方法
无人机高光谱影像不仅包含有河流,还有其他的树木、杂草、土壤、道路、建筑物等,从影像中提取感兴趣的目标物,通常的方法有非监督分类、监督分类、决策树、面向对象分类等,本研究采用监督分类的马氏距离法对拼接好的无人机高光谱影像进行分类,从而提取了中山市和深圳市的某河流信息,并对河流进行叶绿素a、总氮、总磷、悬浮物和浑浊度等水质参数的反演。
3.3 河流叶绿素a的反演
内陆水体遥感中,叶绿素a对水体的光谱特性影响很大,其波谱数据是反映水体富营养化程度的一个重要指标。当叶绿素a的浓度升高时,蓝光波段的波谱反射率下降,红绿光波段的波谱反射率上升,且当叶绿素a的浓度达到一定数值时,叶绿素a的敏感波段向长波方向移动。因此在对叶绿素a进行遥感反演时,常用的方法是根据叶绿素a的敏感波段建立最佳波段或各种波段组合的经验、半经验模型。常用的算法有以下三种:(1)根据叶绿素a在700nm处的反射峰,确定叶绿素a反演模型;(2)根据叶绿素a在700nm处的反射峰和675nm或560nm处的吸收峰的比例关系建立叶绿素a反演模型;(3)采用半经验的航空监测方法,利用叶绿素a在蓝绿光波段对水体反射率的影响,以这两个波段光谱反射率的差异或比值建立叶绿素a浓度反演模型。利用TM图像进行叶绿素a含量分析的时候,一般认为采用TM2(包含550nm反射峰)或TM3(包含685nm荧光峰)与TM1(包含440nm吸收峰)之比值是估算叶绿素a浓度的最佳方法。
官涤等利用巢湖西半湖2005-2009年间的监测资料以叶绿素a浓度作为水华藻类生物量的表征,将水文、气象、水质等各种指标作为水华的环境因子,统计叶绿素a与这些环境因子之间的相关性,并在此基础上建立了多元回归预测模型,找出了驱动水华现象发生的显著因子,为巢湖水华现象的防治提供了理论依据。区铭亮等采用2002年7月以及9-12月都阳湖监测数据,对潘阳湖水体中的叶绿素a浓度的空间分析特征进行了研究,并建立了叶绿素a浓度与总磷、总氮浓度的相关性模型。陈奇等利用云贵高原湖区54个湖泊和水库近20年的监测数据,参照湖泊法、三分法、群体分布法建立了叶绿素a与总磷浓度的参照状态,构建了经验模型(主要包括多元和一元线性回归模型)和形态指数模型。
本文参考国内外的期刊,根据现有的水体叶绿素a反演模型进行对比,选择适合深圳和中山两市河流叶绿素a反演的模型对无人机高光谱影像的河流进行反演,如图4所示。
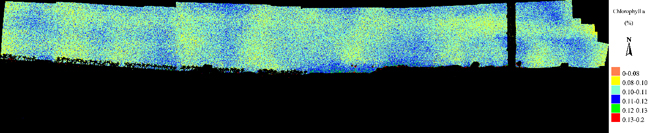
图4.1 中山市某河流无人机高光谱叶绿素a反演图

图4.2 深圳市某河流无人机高光谱叶绿素a反演图
3.4 河流总氮、总磷的反演
水体中总氮、总磷含量是衡量水质的重要指标。常规氮磷的测量方法需要长时间的高温、高压消解,且消解的温度、时间和试剂对测定的结果均有较大的影响,整个操作烦琐、费时和耗力;因此本研究试图利用高光谱遥感技术,通过对水体中氮、磷光谱的测定,探索水体氮、磷与反 射光谱特征的关系,建立氮、磷浓度的反演模型,为湖泊、水库和河流等大型内陆水体氮磷遥感定量监测提供理论依据。目前的一些研究仅根据总氮、总磷与叶绿素含量之间具有密切的相关关系,建立总氮、总磷的遥感信息模型。如王建平等(2003年)利用鄱阳湖地区的TM影像资料,建立了该地区总氮、总磷、叶绿素、悬浮物、化学需氧量和溶解氧6个参数的人工神经网络反演模型,研究结果表明该模型能较好地通过遥感影像实现湖泊水质参数的反演,反演误差基本能控制在25 %以下。雷坤等(2004年)利用中巴地球资源1号卫星的CCD数据和准同步地面监测数据,结合水体组分的光谱特征,建立了太湖表层水体叶绿素a和总氮遥感信息模型。将获得的遥感信息模型应用于影像上,得到整个太湖水面的叶绿素a和总氮浓度分布图。吕恒(2004年)应用TM(ETM +)、MODIS数据分别建立了反演太湖叶绿素悬浮物TNTP等水质参数的线性回归模型和人工神经网络模型(吕恒的博士论文)。张宵宇等(2005年)根据水体悬浮物含量与颗粒态总磷含量的相关关系,利用SeaWiFS 数据反演得到长江口及附近海域颗粒态总磷分布特征遥感图;张穗等(2004年)基于对水体叶绿素光谱特征的分析和河口水体富营养化指标的研究,选取适合长江口特点的叶绿素浓度解译方法,利用总磷、总氮与叶绿素的相关特征得出适合河口特征的富营养化评价方法。并且在长江口的遥感影像上选取合适的实验区对这一方法进行试验,取得了较好的结果。而直接利用无人机高光谱技术对水体总氮、总磷监测的研究尚未报道。
本文根据无人机高光谱采集的影像数据,利用拼接软件对其进行拼接,然后根据经验模型对中山、深圳两市的无人机高光谱河流数据进行总氮和总磷的反演,如图5所示。
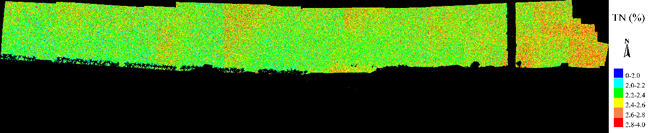
图5.1 中山市某河流无人机高光谱总氮反演图
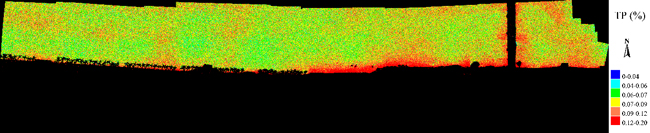
图5.2 中山市某河流无人机高光谱总磷反演图

图5.3 深圳市某河流无人机高光谱总氮反演图

图5.4 深圳市某河流无人机高光谱总磷反演图
3.5 河流悬浮物、浑浊度的反演
悬浮物浓度是内陆水体重要的水质参数之一,会影响水生生物的生长和水体初级生产力。悬浮物浓度常规监测方法易受外界条件限制,无法大面积、周期性的对水体悬浮物浓度进行监测,遥感技术作为区域性水环境调查和监测的一种手段,可克服常规监测方法的不足,己成为监测悬浮物浓度时空分布的重要工具。
自1972年Landsat 1发射以后,MSS数据开始被用于湖泊水质的评价,内陆水体的悬浮物浓度是首先被遥感的参数(齐峰、王学军,1999 )。70年代初,Klemas等(1974)提出了用MSS数据估算Delaware海湾悬浮物浓度的线性统计模型。70年代末提出悬浮物遥感定量的统一模式(Holyer,1978; Munday等,1979)。80年代以后,随着Landsat4和Landsat5的发射,TM数据以其更高的空间、光谱和辐射分辨率吸引研究者研究它的水质监测用途。Lathrop等(1991,1985,1992)对美国Michigan湖的Green湖湾作了一系列遥感研究,估测了包括叶绿素a浓度、悬浮物、透明度在内的多项参数,取得了较理想的结果。Carpenter等(1983)等利用MSS数据得到了澳大利亚三个湖泊的浑浊度算法程。Lathrop等(1992)等应用TM数据得到美国黄石湖的透明度和总悬浮物的回归方程。这些方程的一个共同特点是尽管在各自的湖泊或湖泊群取得了可接受的准确结果,但是不能外推到其他湖泊,除非湖泊的条件非常类似。随后许多学者提出了不同模式来模拟悬浮物与遥感数据的关系。Mahtaba等(1998)等利用地物光谱仪模拟TM波段设置,对不同浓度悬浮物光谱反射率进行测量研究,结果表明TM4波段是估测悬浮物浓度的最佳波段,并建立利用TM4波段反射率估测悬浮物浓度的二次回归模型,结果表明该模型估测效果优于线性模型估测效果。Stumpf等(1989)在Gordon模型和Gordon大气校正方法的基础上,建立AVHRR的CH1, CH2资料来获取中等浑浊度海湾的悬浮物浓度的实用系统。Chen(1991)对18种不同浓度、不同类型、不同粒径的悬浮物在350-2500nm范围的光谱特征研究结果表明:在450-700nm波段范围,悬浮物浓度与反射率是一种对数线性关系,而在700-1015nm波段范围成线性关系。Han等(1998)实验研究发现,当悬浮物浓度大于350mg/L 时,光谱反射率与悬浮物浓度呈线性关系,利用反射率的一阶微分的一元二次回归模型的估测效果比利用反射峰值估测精度高。Barak等(1999)利用机载成像光谱仪CASI数据534、624nm,精度达到0.5mg/L。
在国内,张春桂(1999)根据水体对太阳辐射光谱的反射率变化特性,动态监测福建省近岸悬浮物的定性分布。李京(1986)提出了反射率和悬浮物浓度之间的负指数关系式,并成功地用于杭州湾水域悬浮物的调查中。许君(1999 )等运用SPOT数据对河流水体悬浮固体浓度进行研究,发现SPOT数据的1、2波段对水体中的悬浮固体比较敏感,并根据影像灰度值与悬浮固体之间的相关关系对台湾淡水河的悬浮固体浓度进行了分级评价。赵碧云(2001)等应用TM数据和同步监测资料,对滇池水体总悬浮物浓度与不同波段遥感值进行了关联度分析,并建立了TM图像遥感总悬浮物水质模型。
本文根据目前国内外学者利用高光谱技术对河流水质状况的研究进展,选择监测悬浮物浓度和浑浊度较为稳定的经典模型,利用无人机搭载高光谱相机获取中山市和深圳市的河流影像数据,然后根据经典模型反演中山市和深圳市河流的悬浮物浓度和浑浊度(如图6所示),研究结果对保障河流周边居民的日常生活具有重大意义。
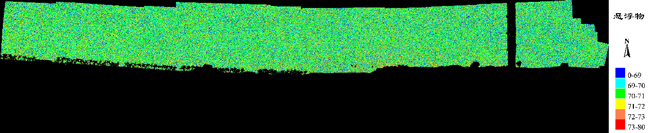
图6.1 中山市某河流无人机高光谱悬浮物浓度反演图
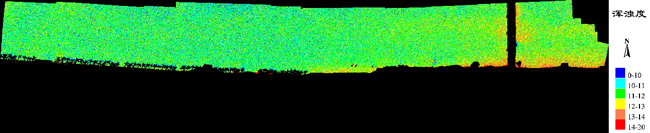
图6.2 中山市某河流无人机高光谱浑浊度反演图

图6.3 深圳市某河流无人机高光谱悬浮物浓度反演图

图6.4 深圳市某河流无人机高光谱浑浊度反演图
4 结论与讨论
本文以中山市和深圳市的河流作为研究对象,利用无人机搭载高光谱成像仪获取河流的光谱图像信息,然后利用拼接软件对获取的影像进行拼接,得到完整的一条河流的高光谱影像数据。本研究由于没有获取河流的水质信息,如反映水质富营养的指标叶绿素a、总氮和总磷等以及反映水污染程度的悬浮物浓度和浑浊度指标,所以只能翻阅国内外的期刊文献,从中找出国内外学者利用高光谱仪研究水体、湖泊富营养和水污染程度的相关模型,通过大量查阅文献可知,目前针对河流、湖泊、海洋富营养或者水污染的研究大部分仅停留在地面或者超大尺度的卫星层面,很少有研究者在地高空领域对河流和湖泊进行富营养和水污染进行研究。本文根据整理的目前研究者在地面尺度研究河流、湖泊富营养以及水污染的高光谱数据模型,从中选择稳定性较好的经典模型,对中山市和深圳市的两条河流进行富营养(叶绿素a、总氮、总磷)和水污染(悬浮物浓度、浑浊度)反演研究。依据现场调研以及高光谱影像反演效果来看,利用无人机高光谱可以在一定程度上反映出河流的富营养和受污染程度,并能根据图像上河流的富营养和受污染分布情况,判断出河流的受污染源以及造成水体富营养的原因。研究结果可为水利水电部门以及环保部门对河流治理提供技术支持。
因此利用无人机高光谱技术可以河流、湖泊、海洋的富营养、水污染进行很好的监测,而且具有广阔的应用前景。然而研究者们虽然已经提出的一系列针对河流、湖泊、海洋的富营养以及水污染的监测和估算模型,但每个模型都有特定的研究方法和适用条件,对于所有的河流、湖泊、海洋,所以很难找到通用的模型对其进行监侧。同时无人机高光谱遥感数据有一些缺陷,比如景观异质性、大气噪音、太阳位置等的干扰都会影响高光谱遥感技术在实际的应用能力。因此如何利用无人机高光谱技术对河流、湖泊、海洋的富营养、水污染研究从定性研究转为定量研究,是目前的难点和热点。
上一页 : 机载高光谱快速检测河湖水质
下一页 : 高光谱对岩石渗水光谱的研究
本文标签:
基于无人机高光谱的水质污染研究分析

相关产品
-
高光谱数据降维和高光谱数据预测模型构建方法有哪些?
高光谱信息在采集的过程中存在光散射、检测物图像不规则以及随机噪声等不利因素,会使光谱曲线出现不平滑,信噪比较低等问题,所以在进行相关数据分析之前需要进行相应的处..
-
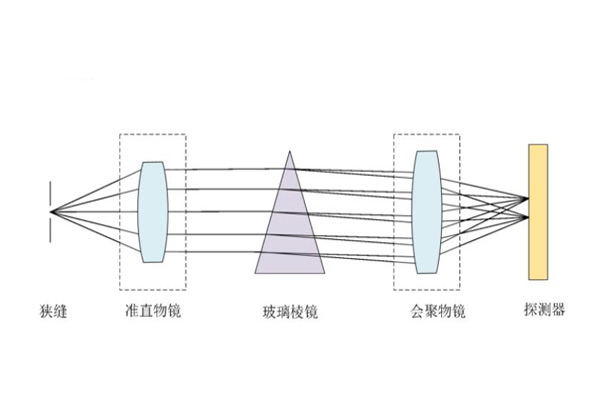
高光谱成像仪最常见的三种分光方式是哪三个?
对于高光谱成像仪而言,其分光系统是高光谱成像仪中的关键部分,直接影响着系统的分光性能、结构的复杂程度、重量和体积等。那么, 高光谱成像仪最常见的三种分光方式是哪..
-

影响无人机高光谱植被覆盖度估算精度的主要因素
近年来,无人机高光谱遥感技术凭借其高空间分辨率、高光谱分辨率、灵活机动等优势,逐渐成为植被覆盖度估算的重要手段。..
-
无人机高光谱在农作物病害监测中的应用优势
无人机高光谱遥感技术作为新兴的无损检测手段,通过搭载高光谱成像设备,能够快速获取农作物冠层的精细光谱信息,为病害的早期识别、定量分析与精准防控提供数据支撑。本文..










