




高光谱图像处理系统——ENVI遥感软件系统
发布时间:2024-03-01
浏览次数:2665
ENVI,全名为Environment for Visualizing Images,作为遥感领域的一款专业软件,以其强大的数据处理和图像分析功能,在全球范围内得到了广泛的应用。本文简单介绍了ENVI遥感软件系统在高光谱领域的应用。
ENVI,全名为Environment for Visualizing Images,作为遥感领域的一款专业软件,以其强大的数据处理和图像分析功能,在全球范围内得到了广泛的应用。本文简单介绍了ENVI遥感软件系统在高光谱领域的应用。

SPEAR Tools全称是光谱处理与分析⼯具(Spectral Processing Exploitation and Analysis Resource),在这⾥ENVI提供了⼀系列的处理⼯具,并形成向导引导使⽤者按照ENVI的标准处理影像。
SPEAR包含以下10个流程化处理模块:
异常检测模块:搜索光谱不同的背景(谱异常)⽬标
变化检测模块:检测统⼀地区不同时段光谱变化的异常
⾕歌地球桥接器:提供⼀个简单的⽅法将ENVI中的图像或⽮量⽂件输出到Google Earth中
道路提取模块:从影像中流程化提取道路信息
⽔体提取模块:从影像中流程化提取河流,隐蔽⽔沟信息
⽔的相对深度模块:从⾼光谱数据中快速获取感兴趣⽔域⽔的相对深度信息影像植被指数提取模块:快捷容易地确定植被的存在情况,并⽤多光谱图像可视化该植被的活⼒⽔平。
船只提取模块:船只提取模块,利⽤⽔和船的对⽐度。以及船的纹理特征来提取船只信息。
异常检测模块(SPEAR Anomaly Detection)
异常检测提供了⼀种⽅法来搜索光谱不同的背景(谱异常)⽬标,ENVI使⽤RXD异常探测算法来检测光谱信息异于影像背景值的⽬标。
由于植被在⼀些地区(⽐如在⼲燥的区域)光谱异常⽐较明显,SPEAR 异常检测模块提供了能够抑制植被的操作。
SPEAR异常检测模块能够依靠设定阈值来减⼩绝对误差。
SPEAR异常检测模块同时提供了滤波、核查和精度评定⼯具。
如果得出满意的结果,可以将其输出成shp⽂件的⽮量格式。
从影像中提取异常信息操作流程如下:
1. 在ENVI主菜单栏下,选择Spectral > SPEAR Tools > Anomaly Detection。
弹出⽂件显⽰对话框,选择输⼊⽂件。(输⼊的⽂件必须是能被ENVI
识别的多光谱数据)设定保存路径。
2. 设定算法模型,包括RXD、UTD、RXD-UTD。
3. 设定异常检测参数,设定Mean Source的来源,指定是否需要抑制植
被。
4. 可以重新设定参数来确定异常,最后会弹出两幅影像,原影像与分析
后结果,以作⽐较。
变化检测模块(SPEAR Change Detection)
变化检测模块提供⼀个⽅法来检测影像同⼀地区不同时段的变化,并在图像上凸显出来,说明是什么要素发⽣了什么变化。
变化检测模块提供以下⼏种相对变化检测⼯具:
Transform:输⼊数据堆栈成⼀个图像,然后图像变换(主成分分析,最⼩噪声⽐率,或独⽴成分分析)应⽤于所提取的特征相关的变化。Subtractive:归⼀化差异植被指数(归⼀化植被指数),红/蓝⽐,和⼈为的⽐例计算的输⼊数据。得出的⽐率数据和波段数据从影像数据中减去以创建出不同的影像。
Two Color Multi-View (2CMV):来⾃于时段1的波段显⽰在红⾊波段通道,来⾃于时段2的同⼀波段显⽰在绿⾊波段通道和蓝⾊波段通道,在⼀个图像⾥区别于其他影像的亮的部分⽤青⾊表⽰,暗的部分⽤红⾊表⽰。颜⾊⽤来表⽰可能存在变化的区域。
⾕歌地球桥接器(Googl e Earth Bridge)
它提供了⼀个简单的⽅法将ENVI中的图像或⽮量⽂件输出到Google Earth 中。Google Earth是⼀个强⼤的数据可视化⼯具,它允许图像被放置在⼀个区域或全球范围内。⾕歌数据桥创建了⼀个包含⽮量数据的kml格式⽂件。如果选择缩略图,kml格式的⽮量⽂件也会被输出。
Google Earth不能直接直接⽀持包含地理坐标的图像,通过四个⾓点和⼀个定义在kml⽂件上的旋转器将图像放在地球上。为了确定图像⽂件
能够准确叠加在上⾯,⾕歌地球桥接器将输⼊图像校正到向北的⽅向。如果可⾏将会通过包含全球⾼程数据库的矫正器来进⾏快速的坐标校准,如果快速校准失败,图像校正的四个⾓点会被⽤来作为控制点,把图像校正⾄正北⽅向。
影像—地图校正模块(SPEAR Image to Map Registration)
影像—地图校正⼯具在保留原有的空间分辨率的同时,变换输⼊的图件来匹配基础图像的地图信息。
1. 在ENVI的主菜单中,选择Spectral > SPEAR Tools > Image-to-Map
Registration,打开⽂件选择对话框。
2. 选择两幅影像:⼀幅作为基础图件,另⼀幅是需要校正的图件。
3. 选择⽤于⾃动连接点匹配的波段,⼤部分情况下,可见光区域的红波
段的是⽐较合适的。
4. 点击下⼀步,会弹出校正参数对话框,下⼀步,会弹出⼀个校正精度
对话框和⼀个连接点对话框。
5. 点击Finish,完成处理,对出向导。
5 独⽴成分分析(Ind ependent Components Analysis)
它可以⽤来发现和分离图像中隐藏的噪声,可以⽤来降维、异常检测、降噪、分类和端元提取以及数据融合,不需要任何图像预先知识。ICA可以把⼀组混合信号转化成相互独⽴的成分,在感兴趣信号与数据中其它信号相对较弱的情况下,这种变换要⽐主成分分析得到的结果更加有效。
6 道路提取模块(Lines of Communication (LOC)- Roads)
从影像中流程化提取道路信息。操作流程如下:
1. 输⼊影像数据
2. 选择线性信息提取⽅法,有两种⽅法可以选择
监督⽅法(基于波谱匹配技术)步骤如下:
1)⼤⽓校正,课选择六种⼤⽓校正⽅法中的任意⼀种。
2)⽤户为绘制道路选择训练的像素
3)选择波谱处理⽅法,绘制道路。有三种⽅法:SAM、MF and MF/SAM ⽐率,主成分分析,红壤指数。
⾮监督⽅法
选择波谱处理⽅法,绘制道路。有两种⽅法,主成分分析,红壤指数。红壤指数性质如同NA VI,计算出来的结果红壤指数以⽩⾊显⽰。
3. 输出提取结果,并可以转化成⽮量数据,以shapefile格式输出。

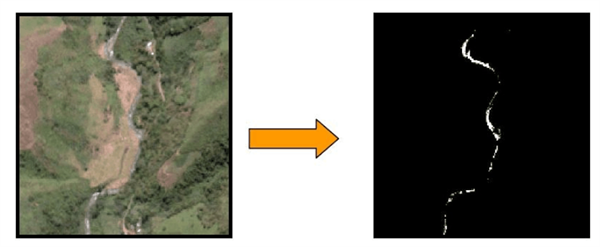
⽔体提取模块(Lines of Communication (LOC)- Water)
从影像中流程化提取河流,隐蔽⽔沟信息。操作流程如下:
1. 输⼊影像数据;
2. 选择线形信息提取⽅法,有两种⽅法可以选择
监督⽅法(
基于波谱匹配技术)步骤如下:
1)⼤⽓校正,可选择六种⼤⽓校正⽅法中的任意⼀种。
2)⽤户为绘制⽔体选择训练的像素。
3)选择波谱处理⽅法,绘制⽔体。有三种⽅法SAM、MF and MF/SAM ⽐
率,主成分分析,归⼀化⽔指数(NDWI)。
⾮监督⽅法
选择波谱处理⽅法,绘制⽔体。有两种⽅法:主成分分析,归⼀化⽔指数(NDWI)。NDWI性质如同NA VI,计算出来的结果是单波段灰度图像。
输出结果,可以将结果转⽮量。
元数据浏览器(SPEAR Metadata Browser)
元数据浏览器从国家影像传输格式(NITF)图像中提取的关键元数据,并⽤⼀个简单的阅读格式来显⽰。此外,这个⼯具提供⼀个⽅法来⽐较多个⽤来变化检测的图像,这种⽅法还可以在收集影像数据时浏览传感器和太阳的三维图形。
正射校正(SPEAR Orthorectification)
⼀个正射校正过的影像包含了对应地⾯的真实⼏何、地形信息。达到⼀定精度的传感器的传感器导致的畸变已经被去除。
正射校正变换把航空照⽚或卫星获得的图像转换为中⼼投影⾄地⾯的正交视图,从⽽消除了因传感器倾斜和地形起伏所带来的误差。整幅影像上⽐例尺是连续的,并忽略了⾼低起伏,因此能够提供⽅向和距离上的精确的测量数据。地理空间专业从业⼈员可以很⽅便的将正射校正数据和其他的地理信息空间数据⼀起应⽤在城市规划、资源管理和其他相关领域。
泛锐化图像融合⽅法(SPEAR Pan Sharpening)
泛锐化图像融合⽅法是⽤⾼分辨率的全⾊数据与较低分辨率的多光谱数据融合创建⼀个彩⾊⾼分辨率的数据集。得出的结果只能做表⾯上的辅助分析⽽不能做深⼊的频谱分析。
地形分类⼯具(TERCAT)
在地形分类(TERCAT)⼯具创建的⼀个输出结果中,具有相似光谱特性的像素被分成类。这些类可以是⽤户⾃⼰定义的或是系统⾃动⽣成。TERCAT⼯具提供所有的标准ENVI的分类算法,加⼀个额外的算法称为“赢家通吃”。
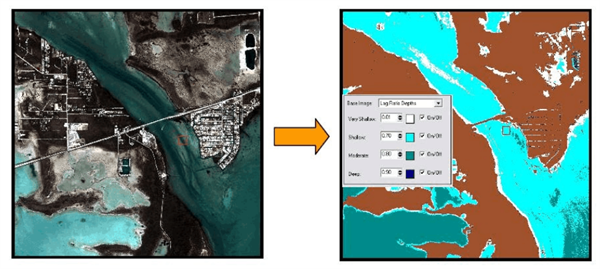
⽔的相对深度模块(Relative Water Depth)
从⾼光谱数据中快速获取感兴趣⽔域的⽔的相对深度信息影像。操作流程如下:
1. 输⼊⾼光谱影像;
2. ⼤⽓校正,提供五种可供选择的⽅法(模糊减少,平均域,对数残差,
IARR反射率,经验线性)。如果没有特殊要求,在本流程中建议不执⾏
该步骤,因为在⽔域的⼤⽓校正过程中,常常引起计算出来的相对⽔深
数据效果不太令⼈满意,甚⾄异常。
3. 选择计算⽔的相对深度的⽅法,有两种⽅法供选择:对数⽐例转换和主
成分分析。
4. 输出与⽔深度相关数据,并把结果加载到可⽤波段列表中。
波谱相似地物提取(Spectral Analogues)
波谱相似地物提取模块
从输⼊影像中提取与已知波谱信息地物类似的地物。操作流程如下:
1. 输⼊多光谱数据;
2. 辐射校正,提供五种可供选择的⽅法(模糊减少,平均域,对数残差,IARR 反射率,经验线性);
3. 选择⽤户感兴趣区域ROI ;
4. 选择波谱处理⽅法,包括:MF、SAM 、MF/SAM 、归⼀化欧⽒距离。
5. 输出突出了波谱相似地物的影像,并加载到可⽤波段列表中。
植被提取模块(SPEAR Vegetation Delineation)
快捷容易地确定植被的存在情况,并⽤多光谱图像可视化该植被的活⼒⽔平。植被指数NDVI提取模块操作流程如下:
1. 输⼊⽂件;
2. 辐射校正,提供五种可供选择的⽅法(模糊减少,平均域,对数残差,IARR 反射率,经验线性);也可以跳过这⼀步;
3. 计算植被指数;
4. 对植被指数结果数据利⽤颜⾊表附上颜⾊,也可以应⽤密度分割的⽅法对植被指数结果数据进⾏密度分割,保存结果。
去除竖条纹(Vertical Stripe Removal)
在图像的同质区域可能会出现⼈为导致的垂直条带,这⼀区域的亮度与附近的亮度是不⼀样的。这些⼈为地物使图像很难识别,它们会为图像的处理产⽣消极的影像。
当图像的背景是相对均匀(整个图像有⼀致的亮度⽔平)时,竖条纹删除⼯具去除⼯具⽐较好⽤。由于它可以产⽣⼈为异常条带,所以在异构图像上(如含有明亮的⼟地和暗⾊⽔域的沿海图像),不推荐使⽤此⼯具。
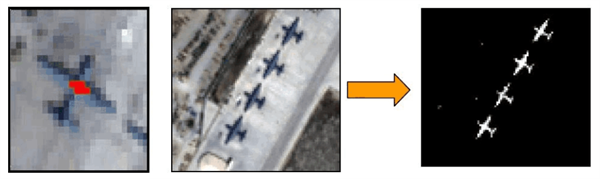
船只提取模块(Watercraft Find er)
船只提取模块,利⽤⽔和船的对⽐度以及船的纹理特征来提取船只信息。操作流程如下:
1. 输⼊待处理⽂件;
2. 选择船只探测的处理⽅法,有两种⽅法供选择:
texture based search 基于纹理的提取,该⽅法允许⽤户⾸先创建⼀个陆地和⽔的掩膜,然后⽤主成份分析的⽅法增强⽔和船的对⽐度,最后利⽤纹理特征提取船。
Two band scatterplot允许⽤户增强⼆维散点图中典型地物所在的像素,从⽽增强船与⽔的对⽐度。
3. 选择纹理提取的⽅法,有pca和skip pca两种⽅法,如果影像的近红外
波段⽔和船的对⽐度很⼤,选⽤skip pca跳过这⼀步,如果不够明显,
选⽤pca来增强对⽐度;
4. 选择进⾏纹理特征提取的波段,(尽量选择⽔和船对⽐度最⼤的波段),
⽣成纹理提取后影像,可以利⽤直⽅图交互式拉伸修改提取的效果,给定纹理滤波的域值,进⾏纹理滤波;
5. 去除salt and pepper以及陆地等⾮船信息;
6. ⽣成船只提取结果影像;
7. 将结果影像转⽮量并⾃动叠加到原始影象上。
上一页 : 高光谱成像技术有哪些类型?其优势是什么?
下一页 : 【招标公告】东南大学建筑学院机载高光谱影像系统采购公开招标

相关产品
-
高光谱数据降维和高光谱数据预测模型构建方法有哪些?
高光谱信息在采集的过程中存在光散射、检测物图像不规则以及随机噪声等不利因素,会使光谱曲线出现不平滑,信噪比较低等问题,所以在进行相关数据分析之前需要进行相应的处..
-
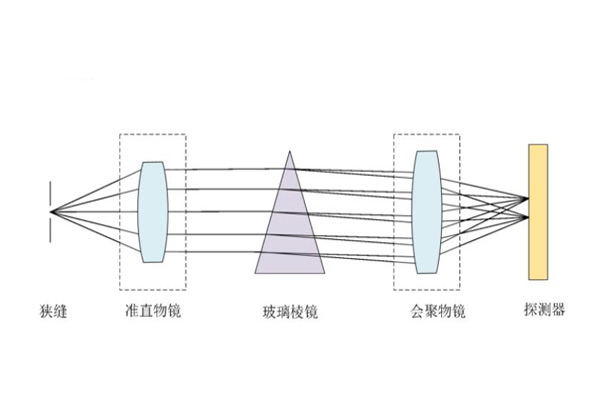
高光谱成像仪最常见的三种分光方式是哪三个?
对于高光谱成像仪而言,其分光系统是高光谱成像仪中的关键部分,直接影响着系统的分光性能、结构的复杂程度、重量和体积等。那么, 高光谱成像仪最常见的三种分光方式是哪..
-

影响无人机高光谱植被覆盖度估算精度的主要因素
近年来,无人机高光谱遥感技术凭借其高空间分辨率、高光谱分辨率、灵活机动等优势,逐渐成为植被覆盖度估算的重要手段。..
-
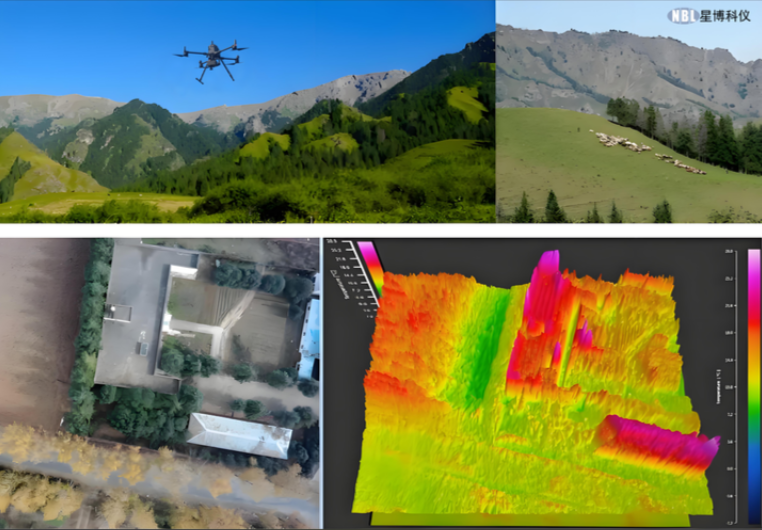
无人机高光谱在农作物病害监测中的应用优势
无人机高光谱遥感技术作为新兴的无损检测手段,通过搭载高光谱成像设备,能够快速获取农作物冠层的精细光谱信息,为病害的早期识别、定量分析与精准防控提供数据支撑。本文..










