




基于无人机高光谱遥感在智慧城市建设中的研究与应用
发布时间:2023-04-25
浏览次数:1730
高光谱遥感已成为获取更精细信息、为“智慧城市”定量分析和精细化管理提供丰富、准确、合理数据的重要技术手段。
高光谱遥感已成为获取更精细信息、为“智慧城市”定量分析和精细化管理提供丰富、准确、合理数据的重要技术手段。为了更好地理解和利用高光谱数据助力数字城市建设,本文介绍了高光谱遥感影像的特征和特征研究。那么如何通过无人机采集城市地物的高光谱信息呢?(无人机)和高光谱成像仪进行了描述,大大提高了城市数据采集的效率。最后,详细分析讨论了基于无人机的高光谱遥感和城市地物深度信息挖掘的各种应用案例,如地形分类、城市绿化分析等。研究结果表明,机载高光谱影像(HIS)具有与彩色摄影和多光谱遥感相比的独特优势,具有更丰富和更高水平的光谱细节和物理和化学性质。
基于无人机的高光谱遥感智慧城市建设地形分类城市绿化分析
1、介绍
智慧城市是利用大数据、云计算、物联网(IoT)、遥感(RS)等技术,对城市进行多分辨率、多尺度、多时空、多类型的三维描述。) 和人工智能 (AI) [1]。城市信息可以建立在地理坐标系上,方便每个人通过互联网了解城市的过去、现在和未来[2]。众所周知,测绘、遥感和地理信息技术在智慧城市建设中发挥着越来越重要的作用[3]。基于无人机的遥感技术作为城市多维信息采集的重要手段具有成本低、效率高、操作灵活、覆盖面广等优点,被广泛应用于智慧城市建设的应急管理、城市规划、旅游管理、环境监测等诸多领域。
2、问题
智慧城市的发展与建筑物、植被、水体、交通、人口分布、环境、空气质量等方面的信息密切相关[6],因此,如何准确获取和高效监测城市信息,实现城市可持续发展发展是智慧城市建设的重要挑战[7]。
传统无人机搭载的航拍光学遥感影像仅由红、绿、蓝波段的光信息组成,无法通过人工目视解译监测建筑物识别,效率低且精度有限[ 8 , 9 ]。UAV-LiDAR(Laser Radar)可以解决传统航空摄影测量无法完成的任务,如夜间数据采集、植被提取、DEM(Digital Elevation Model)提取、精细结构建模等。但LiDAR的主要问题成本高、重量大、操作复杂、数据利用率低[10]。
光谱分析作为自然科学分析的重要手段,常被用来检测物体的物理结构、化学成分等指标。图像光谱测量将光谱技术与成像技术、光谱分辨率与图形分辨率相结合,创造了表面光谱分析的空间维度,即现在的多光谱成像和高光谱成像技术[11]。可以识别地物的形状和结构,也可以根据光谱特征的差异提取各种物体的分类。多光谱图像的主要问题是光谱分辨率低,波段宽,导致多光谱数据 对物体的信息表达有限[12]。
3、高光谱遥感
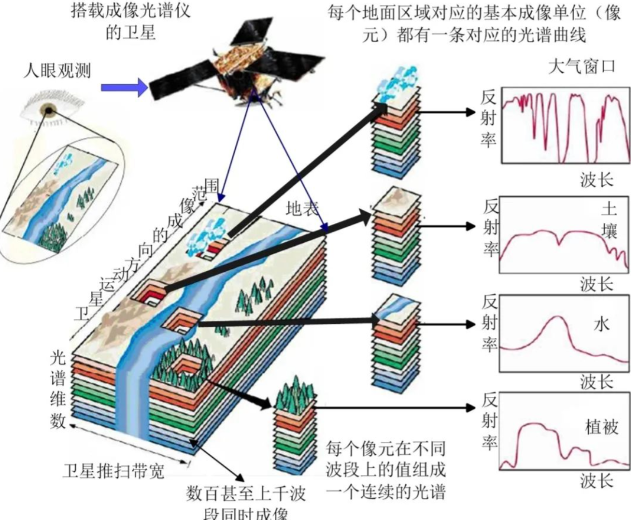
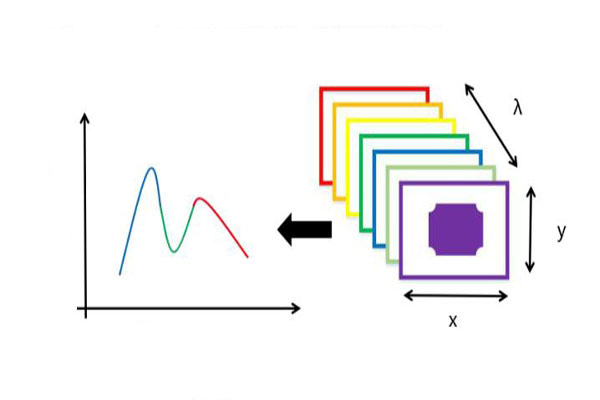
高光谱遥感是获取更多智慧城市精细化信息的重要技术。对城市绿化程度和质量、城市工程岩土特征、水污染分析等进行分析统计是必不可少的。高光谱图像是光谱范围为10 -2 λ,光谱分辨率小于10 nm的光谱数据。一张高光谱图像由 n 个像素组成,每个像素由 M 维光谱向量组成。高光谱图像包含从可见光到红外的数十到数百个连续和分段波段的物体信息光谱区域。成像光谱仪获取高光谱数据,为每个像素提供300-400个窄带光谱信息,生成完整连续的光谱曲线(见图1)。
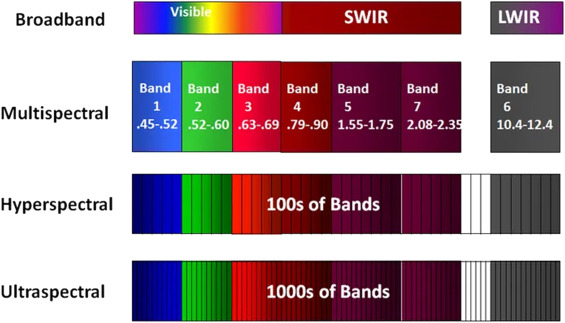
图1多光谱和高光谱数据之间的差异
高光谱数据反映了高分辨率光学信息的特征。高光谱传感器利用许多窄电磁波波段获取地面物体的相关信息。由于高光谱图像具有较高的光谱分辨率,因此高光谱图像可以提供更多的地物细节信息,有利于地物物理化学性质的反演。可以为不同的设施提取它们独有的波段特征,使得原本在宽带遥感中无法检测到的物质可以在高光谱数据中检测到[15]。
高光谱传感器包括航天高光谱传感器、机载高光谱传感器和地面高光谱成像仪等,搭载在卫星、飞机、地面操纵仪器等不同高度的遥感平台上[16]。与星载高光谱遥感相比,机载高光谱遥感具有更高的探测精度。高光谱图像采样间隔小,分辨率小于3 nm。精细的光谱分辨率反映了地物光谱的细微特征。不同地物的高光谱分布如图2所示。
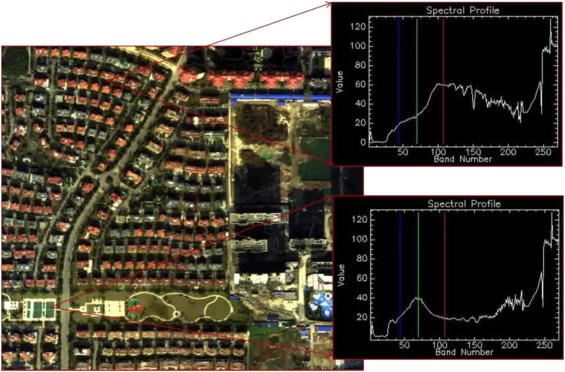
图2不同地面物体的光谱轮廓
4、无人机高光谱图像数据采集
无人机是目前城市高光谱遥感图像数据采集的载体。在数据采集过程中,地面操作人员应注意通过无人机飞控系统科学规划飞行参数和飞行路线,地面参数也应谨慎设置[17]。当无人机到达预定位置后,地面控制中心向无人机飞控系统发送采集指令,可有效保证图像重叠率,提高采集效率,获得高质量图像。
高光谱遥感图像获取过程主要分为以下四个步骤:
(1)第一步确定无人机平台的飞行参数,包括无人机平台的飞行高度、飞行速度、图像重叠率等。需要注意的是,这些参数是相互独立的,在确定参数时又相互影响。因此,需要结合任务的实际要求和设备的性能综合考虑。在实际应用中,首先需要确定重叠率以保证图像精度,然后根据分辨率确定飞行高度,最后根据相机频率确定速度。
(2) 第二步,规划飞行路线。通过无人机飞控软件可以提前规划飞行路线。曲折的飞行路线通常被设计成可以更全面地拍摄城市地区而没有角落问题。
(3) 第三步确定相机参数,主要是确定相机的焦距、曝光时间等。焦距决定了图像采集的清晰度。不建议采用自动对焦模式,因为它会导致高光谱成像模糊。成像仪曝光时间的控制是决定拍摄质量的关键。如果成像仪的曝光时间过长,将会丢失一些遥感信息。但如果曝光时间过短,图像的信噪比会降低。另外,采集过程对环境的照度也有一定的要求。一般来说,高光谱遥感图像应该在两个小时内采集,也就是中午左右。
(4) 最后一步是通过无人机携带的高光谱成像采集数据。地面控制器将成像仪镜头调整到垂直向下的位置,无人机飞行过程中即可自动进行图像采集。无人机高光谱遥感飞行图如图3所示。
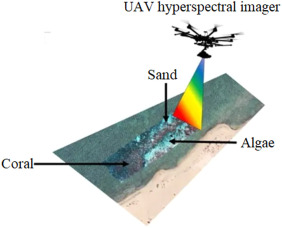
图3无人机高光谱遥感飞行示意图
5、地形分类
不同的地形有不同的高光谱曲线,因此可以根据不同的光谱反射率值快速对智慧城市的地形进行分类,如图4所示,分别为植被、水体、道路、建筑物、车辆的高光谱反射率曲线。
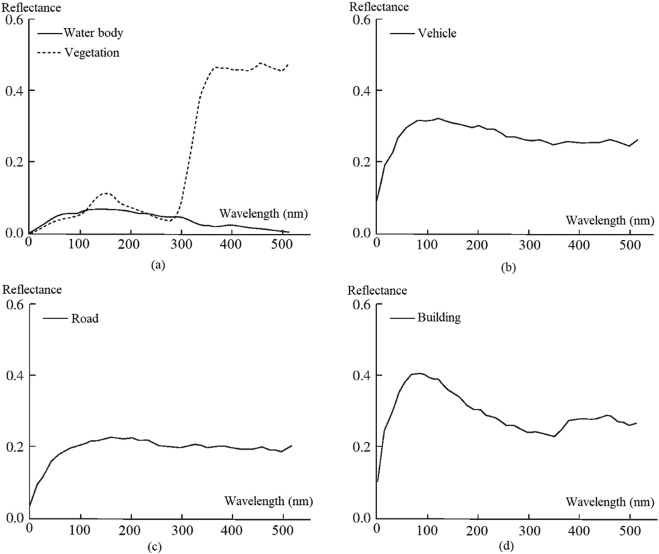
图4不同地形在不同波段的光谱反射率
从图4 (a)可以看出,植被反射率变化的陡坡位于第126~164波段,根据公式( 1),然后可以利用NDVI(差异植被指数)值来分离植被。
水体光谱曲线整体偏低,变化较为平缓。在第226波段的近红外波段(中心波长为900.12nm),水体的辐射值很低(平均值小于0.005)。因此,可作为水体的分离条件,判断第226条带是否小于0.02。
通过观察光谱特性曲线,建筑物的光谱曲线在第25波段处于峰值位置,建筑物的反射率在第77波段下降最快。因此,利用两个波段反射率的差异来区分建筑物。
由于建筑物和植被的双重阴影,道路和水体的反射率很低,难以区分。但与道路相比,水体的整体反射率很低,因此当水体处于同一波段区域时,其反射值变化缓慢。在137和162 nm波段之间,水体有一个相对反射率迅速下降的斜坡,这正是道路所没有的特征。因此,可以利用光谱变量特性对水体进行分离。水体在137~162 nm波段的反射率曲线处于上升阶段,因此可以通过式(2)分离出部分属于水体的道路。
对地形进行特征分类的目的是更好地观察城市地物,如植被、建筑物、土壤、道路、水体、树木等[18] 。分类方法通常采用监督分类和SVM(支持向量机)进行监督学习。端元检测主要用于提取图像中的单个物体,如道路或建筑物。首先通过ENVI软件提取道路或建筑物的光谱数据作为端元检测的输入数据。然后应用光谱角度检测方法识别高光谱图像中的研究对象. 原始检测结果存在一些噪声和散点,需要优化。分类后处理工具,包括最大值分析和聚类,用于去除小斑块噪声。优化结果如图 6 所示。5和6。
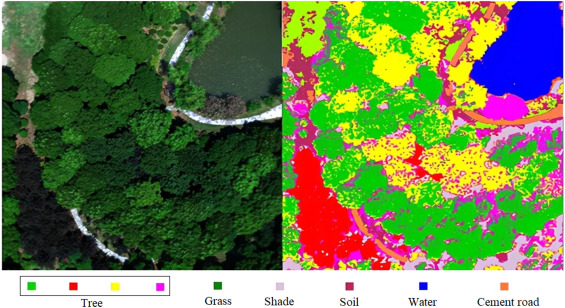
图5基于高光谱数据的景观分类结果
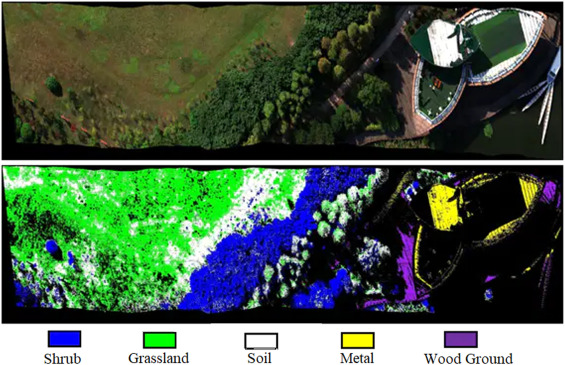
图6基于高光谱数据的 Pecies 分类结果
6、城市绿化分析
城市绿化是城市可持续发展的重要内容之一。传统的测量分析方法难以对城市绿化环境进行快速分析。通过无人机的高光谱手段,城市管理者可以提取城市绿地,进一步分析植被的健康水平、病虫害、含水量或易燃风险[19]。以常用的三个绿化指标为例,对城市绿化率进行定量分析。
(1) 红色归一化植被指数(ReNDVI)
该指标是传统NDVI的改进,更适用于不同密度条件下的植被健康检测。应用包括精准农业、森林监测和植被压力检测。绿色植被 ReNDVI 的常见范围是 0.2 到 0.9。主要用于测量植被健康状况。ReNDVI 值越高,植被越健康。RENDVI的计算公式如式(3)。
分别表示对应于 750 nm和 705 nm波长的反射率 。分析结果示意图如图7所示。

图7植被生长分析结果
(2)结构不敏感色素指数(SIPI)
SIPI指数最大限度地提高了对大量类胡萝卜素与叶绿素比例的敏感性,同时降低了对冠层结构变化的敏感性。应用包括植被健康监测和植物生理胁迫检测。绿色植被SIPI的常见范围是0.8~1.8。该指数主要用于衡量植被胁迫。SIPI值越高,植被生长压力越大。SIPI的计算公式如式(4)。
分别代表波长445nm、680nm、705nm对应 的反射 率值 。分析结果示意图如图8所示。
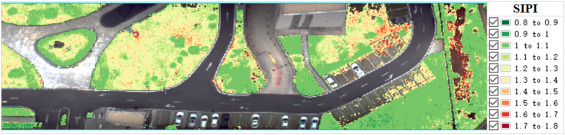
图8植被生长胁迫分析结果
(3)水带指数(WBI)
含水量是植被的一个重要参数。冠层含水量指数衡量的是叶冠中的含水量。较高的含水量表明植被更健康,可能生长得更快或火灾风险更低。随着冠层含水量的增加,叶片在970 nm处的光吸收强度 较900 nm处逐渐增强。应用包括树冠压力分析、火灾风险分析和农业管理。绿色植被的 WBI 的常见范围是 0.8 到 1.2。该值越高,植被含水量越低。SIPI的计算公式如式(5)。
分别代表970 nm和900 nm波长对应的反射率值 。分析结果示意图如图9所示。
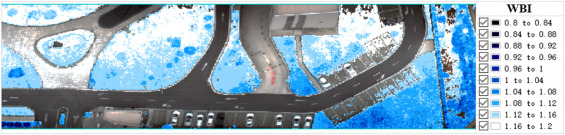
图9植被冠层含水量分析结果
7、城市水环境分析
随着经济的快速发展和人类活动的加强,河流、湖泊的水污染问题日益严重。传统的水环境调查采用人工野外采样和实验室采样分析,效率低下,研究范围有限。因此,有必要通过高光谱成像技术手段进行综合研究,保护水环境[20]。
基于水体高光谱图像数据的反演模型很容易识别城市水体污染。研究了城市内河水体的浊度和叶绿素浓度。浊度可以反映水体污染情况,叶绿素浓度可以反映水体富营养化程度。分析结果如图10(a)和10(b)所示。
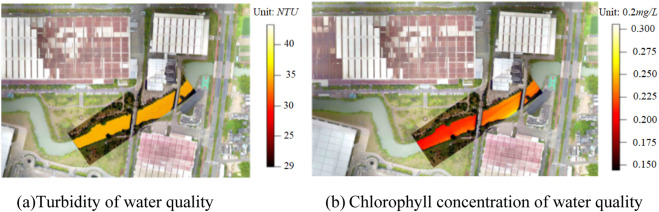
图10河流水质浊度和叶绿素浓度分析结果
8、岩性鉴别
岩土特性是城市工程建设的基础。根据电磁波理论,任何物质光谱的产生都有严格的物理机制[21]。岩石和矿物的光谱特征主要是由于组成物质中离子和基团的晶场效应以及基团的振动。由于各种矿物的晶体结构不同,晶格振动产生的各种矿物的光谱特征也不同,如图11所示。
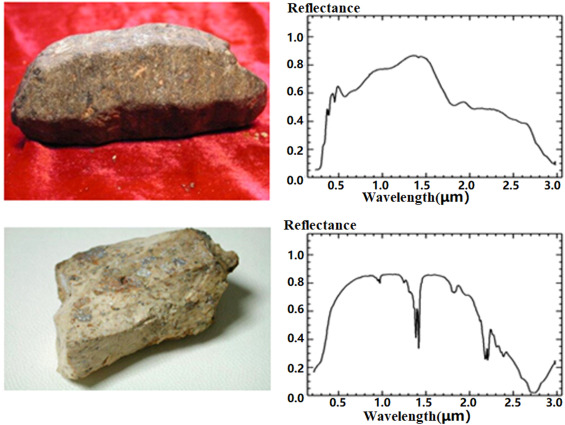
图11不同岩石的高光谱特征
矿物晶格中铁等过渡金属元素的存在决定了0.4∼1.3 μm范围内的光谱特性 。1.3∼2.5 μm光谱范围内的光谱特征 由矿物成分中的碳酸盐、羟基和可能存在的水分子决定。3~5 μm红外波段的光谱特性 由Si-O、Al-O等分子键的振动模式决定。电子因不同能级之间的跃迁而吸收或发射特定波长的电磁辐射,从而形成特定波长的光谱特性[22] . 因此,不同晶格结构的岩石的矿物成分具有不同的光谱特征。
高光谱遥感影像可以检测到岩石和土壤的精细光谱,从而可以根据高光谱遥感检测到以前在宽带中无法检测到的光谱特征。不同类型的岩石可以通过各种岩石和土壤的高光谱反射率特征来识别,如图12所示。
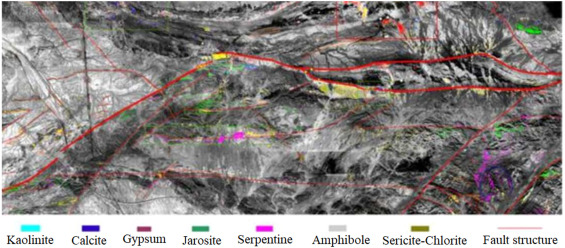
图12基于高光谱遥感影像的岩性分类
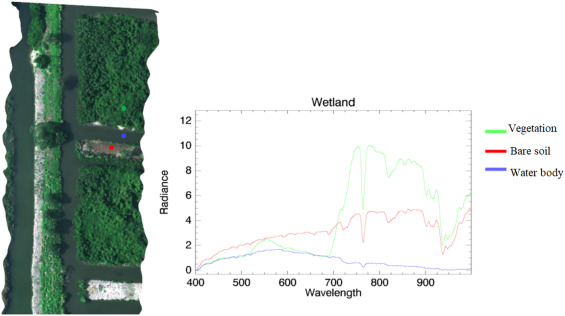
9、工程应用
图 13为城市红树林湿地公园的高光谱信息,重点观察植被、裸土和水体。无人机飞行高度为200 米,飞行速度为4.5 米/秒,曝光时间为10 毫秒。从图13可以看出植被在绿光区有明显的反射峰,在红光区有明显的吸收谷。反射率在可见光波段和近红外波段(约0.73μm)之间急剧上升,形成“红边”现象。“绿峰”、“红谷”、“红边”是绿植曲线最明显的三个特征。土壤的光谱反射率值在可见光区和近红外区上升缓慢,其光谱反射率曲线与农作物有较大差异。水体的光谱反射率值在各个波段都比较平缓。
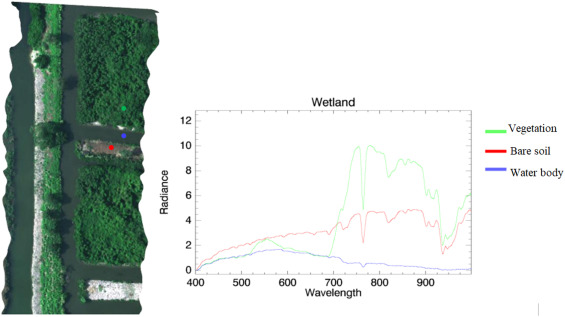
图13工程应用案例一结果
图 14为纳米高光谱成像仪搭载无人机采集的贵阳百花湖入海口河道高光谱数据。飞行高度为150 米,飞行速度为3 米/秒,曝光时间为10 毫秒。百花湖入水口植被、裸土和水体的高光谱结果如图14所示。从图14可以看出,该区域土壤和水的高光谱反射率正常。相比之下,植被的高光谱反射率峰值集中在800 nm附近。
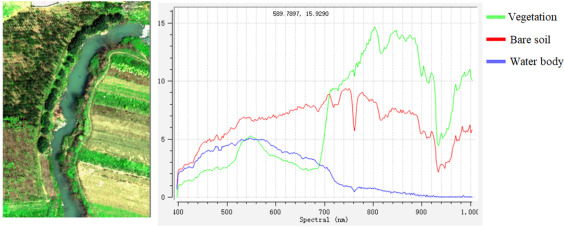
图14工程应用案例二的结果
下图显示了无人机成像仪采集的某大学校园草坪的高光谱数据。飞行高度为150 米,飞行速度为3 米/秒,曝光时间为5 毫秒。从下图可以看出,该区域植被、土壤、水体的高光谱反射率正常。
10、结论
高光谱遥感利用较窄的电磁波段获取物体的相关信息,包括丰富的空间信息、辐射信息和光谱信息。与宽带遥感数据相比,高光谱遥感数据具有光谱分辨率高、光谱细节更丰富、层次更高、信息无损、实时性强等优点,可以方便快捷地获取整体观测数据。某个地区的。无人机为城市高光谱遥感影像的数据采集提供了一种低成本、高效、灵活的载体。计算机软件对采集到的图像信息进行处理,将高光谱数据的数字值转换为反射率数据(红外线、近红外线和可见光)。连续光谱信息可以通过降噪获得地面及其附着物的信息。应用高光谱遥感的完整光谱曲线描述地物的光谱特征,识别各种地物的诊断光谱,可为当前建设的建筑物分类、土地利用变化检测和目标识别提供关键信息和智慧城市的发展。
上一页 : 高光谱成像在回收行业应用
下一页 : 高光谱相机在文物颜料鉴定中的应用

相关产品
-
高光谱数据降维和高光谱数据预测模型构建方法有哪些?
高光谱信息在采集的过程中存在光散射、检测物图像不规则以及随机噪声等不利因素,会使光谱曲线出现不平滑,信噪比较低等问题,所以在进行相关数据分析之前需要进行相应的处..
-
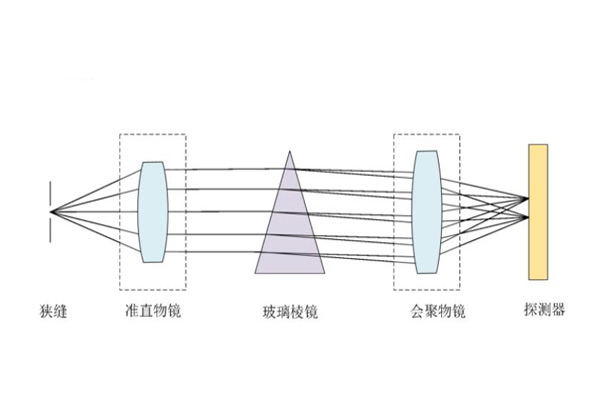
高光谱成像仪最常见的三种分光方式是哪三个?
对于高光谱成像仪而言,其分光系统是高光谱成像仪中的关键部分,直接影响着系统的分光性能、结构的复杂程度、重量和体积等。那么, 高光谱成像仪最常见的三种分光方式是哪..
-

影响无人机高光谱植被覆盖度估算精度的主要因素
近年来,无人机高光谱遥感技术凭借其高空间分辨率、高光谱分辨率、灵活机动等优势,逐渐成为植被覆盖度估算的重要手段。..
-
无人机高光谱在农作物病害监测中的应用优势
无人机高光谱遥感技术作为新兴的无损检测手段,通过搭载高光谱成像设备,能够快速获取农作物冠层的精细光谱信息,为病害的早期识别、定量分析与精准防控提供数据支撑。本文..










